
- 首页
- 上一级
- ArrayList、LinkedList与Vector的区别?.md
- ArrayList的subList方法有什么需要注意的地方吗?.md
- ArrayList的序列化是怎么实现的?.md
- ConcurrentHashMap为什么在JDK1.8中使用synchronized而不是ReentrantLock.md
- ConcurrentHashMap为什么在JDK1.8中废弃分段锁?.md
- ConcurrentHashMap在哪些地方做了并发控制.md
- ConcurrentHashMap是如何保证fail-safe的?.md
- ConcurrentHashMap是如何保证线程安全的?.md
- HashMap、Hashtable和ConcurrentHashMap的区别?.md
- HashMap在get和put时经过哪些步骤?.md
- HashMap是如何扩容的?.md
- HashMap用在并发场景中有什么问题?.md
- HashMap的hash方法是如何实现的?.md
- HashMap的remove方法是如何实现的?.md
- HashMap的容量设置多少合适?.md
- HashMap的数据结构是怎样的?.md
- JDK1.8中HashMap有哪些改变?.md
- Java8中的Stream用过吗?都能干什么?.md
- Java中的集合类有哪些?如何分类的?.md
- Set是如何保证元素不重复的.md
- Stream的并行流是如何实现的?.md
- hash冲突通常怎么解决?.md
- 为什么ConcurrentHashMap不允许null值?.md
- 为什么HashMap的Cap是2^n,如何保证?.md
- 为什么HashMap的默认负载因子设置成0.75.md
- 为什么在JDK8中HashMap要转成红黑树.md
- 什么是COW,如何保证的线程安全?.md
- 什么是fail-fast?什么是fail-safe?.md
- 你能说出几种集合的排序方式?.md
- 同步容器(如Vector)的所有操作一定是线程安全的吗?.md
- 如何将集合变成线程安全的?.md
- 遍历的同时修改一个List有几种方式?.md
✅hash冲突通常怎么解决?
典型回答
常见的5种方法:
- 开放定址法
- 开放定址法就是一旦发生了冲突,就去寻找下一个空的散列地址,只要散列表足够大,空的散列地址总能找到,并将记录存入。
- 常见的开放寻址技术有线性探测、二次探测和双重散列。
- 这种方法的缺点是可能导致“聚集”问题,降低哈希表的性能。
- 链地址法
- 最常用的解决哈希冲突的方法之一。
- 每个哈希桶(bucket)指向一个链表。当发生冲突时,新的元素将被添加到这个链表的末尾。
- 在Java中,HashMap就是通过这种方式来解决哈希冲突的。Java 8之前,HashMap使用链表来实现;从Java 8开始,当链表长度超过一定阈值时,链表会转换为红黑树,以提高搜索效率。
- 再哈希法
- 当哈希地址发生冲突用其他的函数计算另一个哈希函数地址,直到冲突不再产生为止。
- 这种方法需要额外的计算,但可以有效降低冲突率。
- 建立公共溢出区
- 将哈希表分为基本表和溢出表两部分,发生冲突的元素都放入溢出表中。
- 一致性hash
- 主要用于分布式系统中,如分布式缓存。它通过将数据均匀分布到多个节点上来减少冲突。
扩展知识
链地址法
HashMap采用该方法,当出现hash冲突的时候,会使同一个hash的所有值形成一个链表。查询的时候,首先通过hash定位到该链表,然后再遍历链表获得结果。
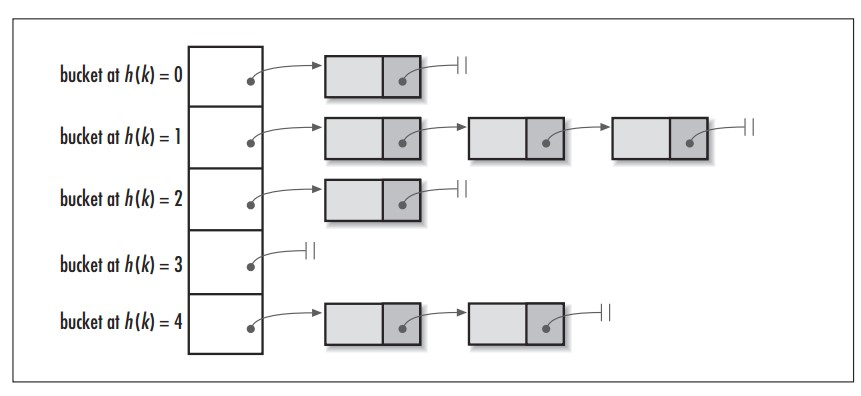
此时,对于hash(5)和hash(6)的冲突来说,则会在hash表的第三个节点形成链表,如:hash[3]->5->6
优点:
- 处理冲突简单
- 适合经常插入和删除的情况下
- 适合没有预定空间的情况
缺点
- 当冲突较多的时候,查询复杂度趋近于O(n)
开放定址法
开放定址法是解决哈希表中哈希冲突的一种方法。与链地址法不同,开放寻址法在哈希表本身的数组中寻找空闲位置来存储冲突的元素。这种方法的关键在于,当一个新的键通过哈希函数定位到一个已被占用的槽位时,它将探索哈希表的其他槽位,直到找到一个空槽位。
开放寻址法主要有以下几种实现方式:
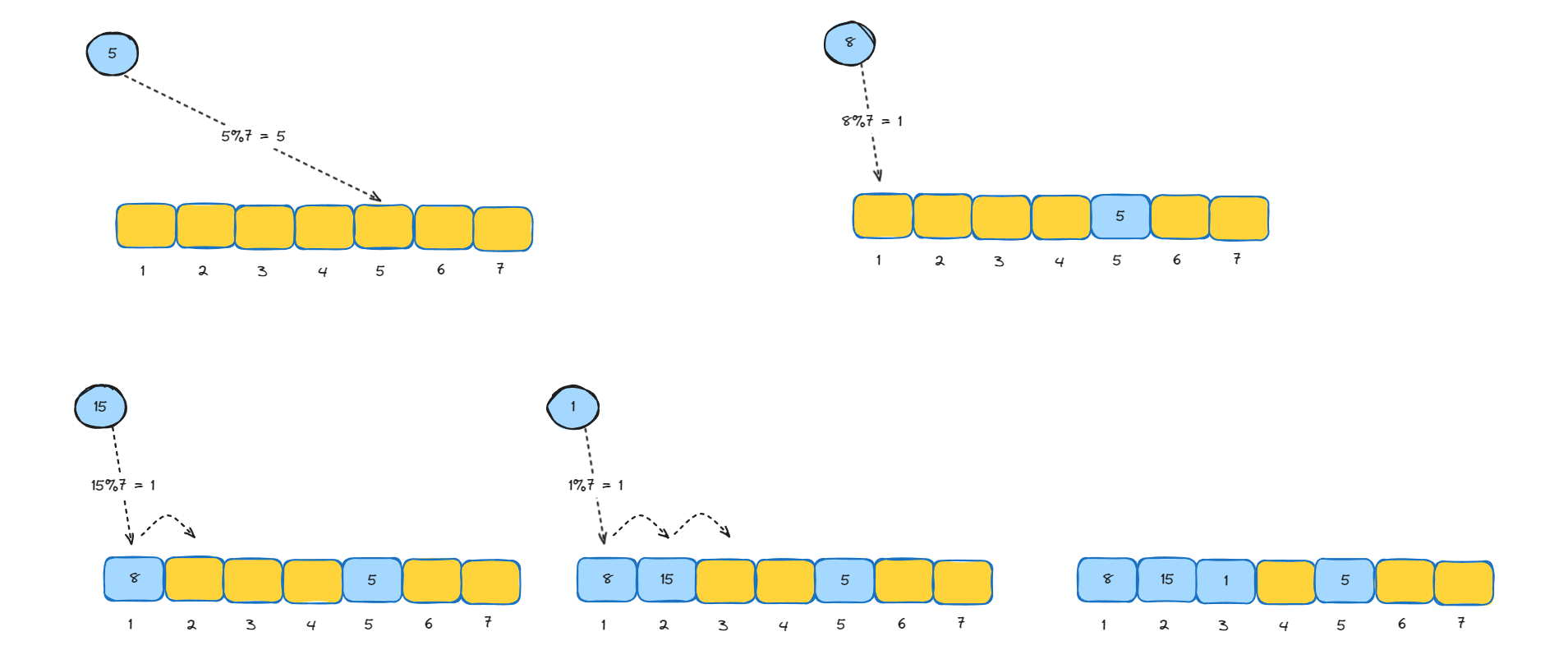
- 线性探测(Linear Probing):
- 当发生冲突时,顺序检查表中的下一个槽位。
- 如果该槽位也被占用,则继续向下检查,直到找到一个空槽位。
- 线性探测的问题在于“聚集”:一旦发生多次连续冲突,就会形成一长串被占用的槽位,这会影响后续插入和查找的效率。
如使用大小为7的hash表,依次存储5、8、15、1
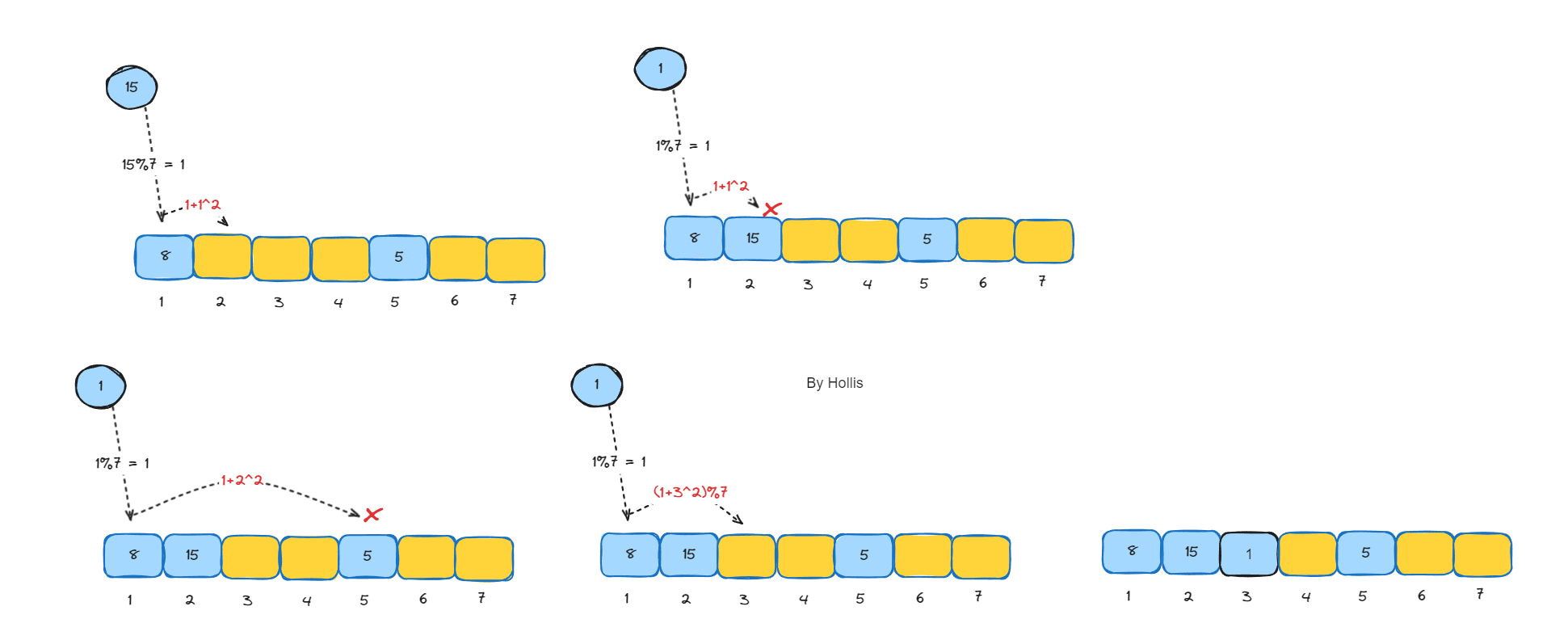
- 二次探测(Quadratic Probing):
- 使用二次方的序列来探测下一个槽位(例如,1, 4, 9, 16, ...)。
- 这种方法可以减少聚集的问题,但仍然可能存在较小范围的聚集。
同样是依次存储5、8、15、1,当存储到15和1的时候开始冲突,结果如下:
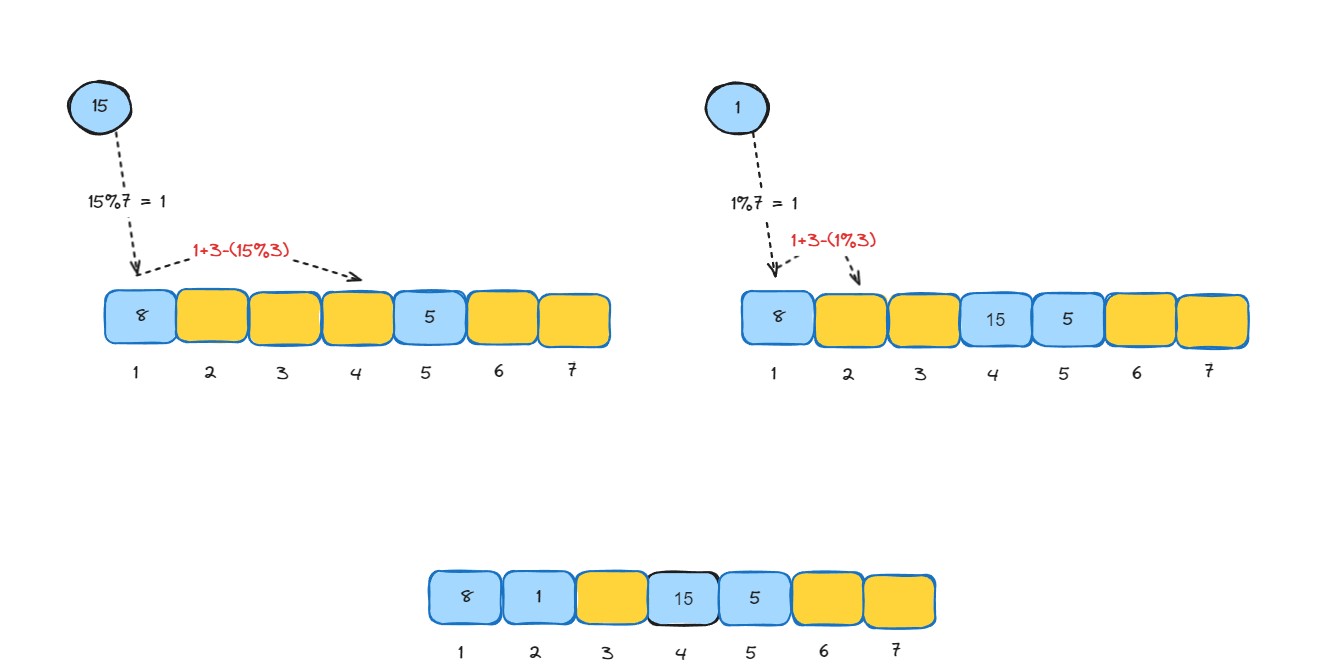
- 双重散列(Double Hashing):
- 使用两个不同的哈希函数。
- 当第一个哈希函数导致冲突时,使用第二个哈希函数来确定探测序列。
- 这种方法的优点是减少了聚集,并且能更好地分散键的分布。 -
同样是依次存储5、8、15、1,假设第二个哈希函数为 hash2(key) = 3 - (key % 3)。
-
开放定址法的优点是:
- 空间效率:由于不需要额外的数据结构(如链表),开放寻址法通常比链地址法使用更少的内存。
- 缓存友好性:由于数据存储在连续的内存空间,所以在寻址时可能有更好的缓存性能。
然而,开放寻址法也有缺点:
- 当负载因子(即表中已占用的槽位比例)较高时,查找空槽位的时间可能会显著增加。
- 删除操作相对复杂,因为简单地将槽位置为空可能会打断探测序列。
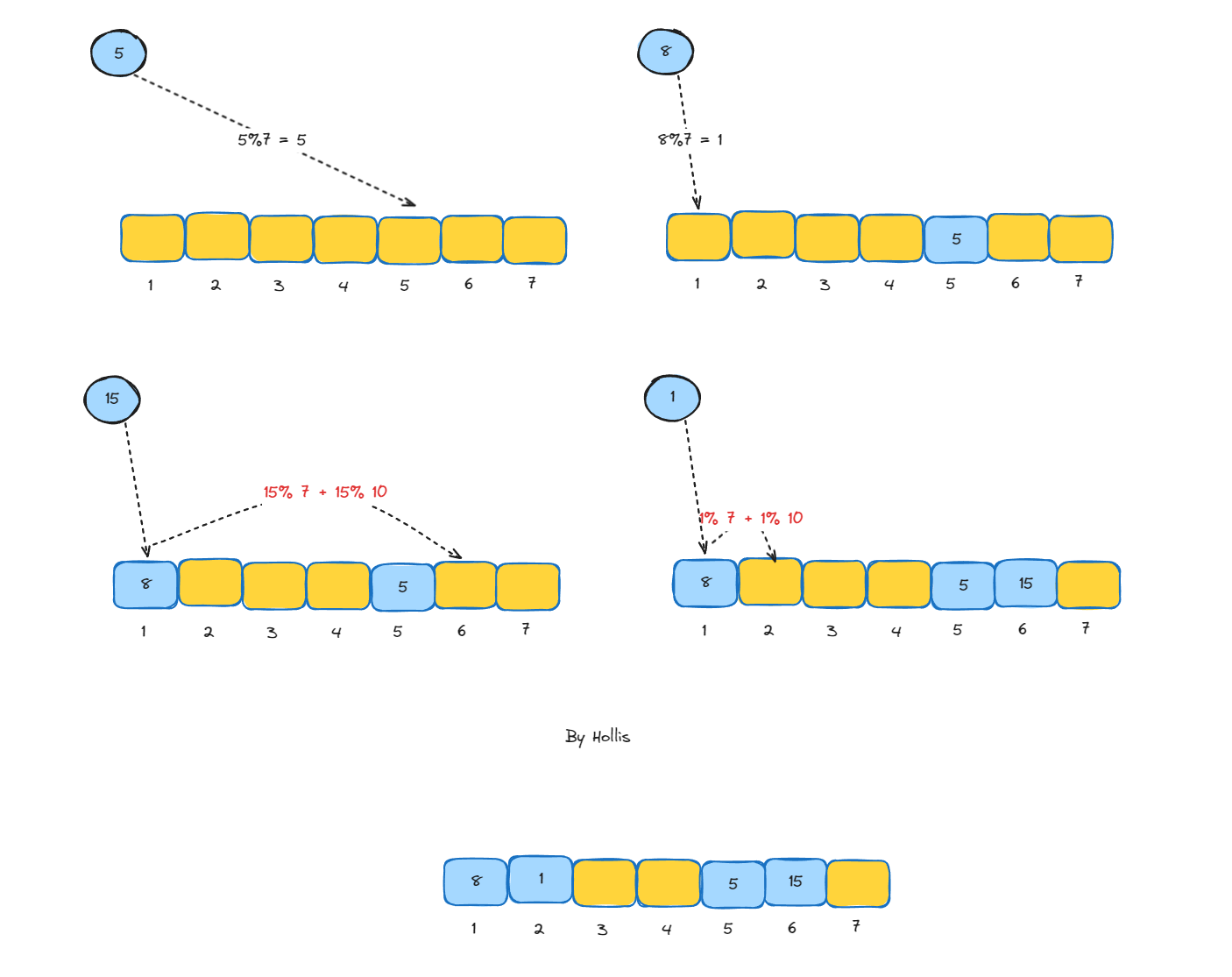
再哈希法
当发生冲突时,需要更换hash函数,直到新的hash函数没有冲突
假设两个哈希函数定义如下:
- 第一个哈希函数:
hash1(key) = key % 7 - 第二个哈希函数:
hash2(key) = key % 7 + key % 10
我们要插入的键值是:5、8、15、1
双重散列和再哈希的区别
通过上面的例子,很多人会疑惑,双重散列和再哈希好像都是多个哈希函数进行的,看上去是一样的?
其实大差不差,要说区别的话,在哈希的两个函数没有任何关系,第二次哈希的结果是啥就按照啥进行存储,如key % 7 + key % 10 的结果是6,那么就直接向6这个位置上存储。而双重散列是开放定址的一种,第二个哈希的结果是在第一次冲突那个位置基础上进行寻址的,如哈希函数是3-(key%3) = 2 ,那么最终是在之前的冲突位置向后找2个。